Your cart is currently empty!

Frank Fu

Building NavBot-D1: From Parts, Jetson, and ROS 2 to Reinforcement-Learning Locomotion
BY
NavBot-D1 is an open quadruped robotics platform for developers. Its value is not just…

Building a Desktop AI Companion with RDK X5, OpenClaw, NavTalk, and MQTT
BY
Project Overview This project is a desktop AI companion prototype. It uses the RDK…

NavTalk Official Support for NVIDIA RTX 5090 on Linux
BY
NavTalk’s digital human lip-sync and real-time audio/video capabilities are fully supported for deployment and…
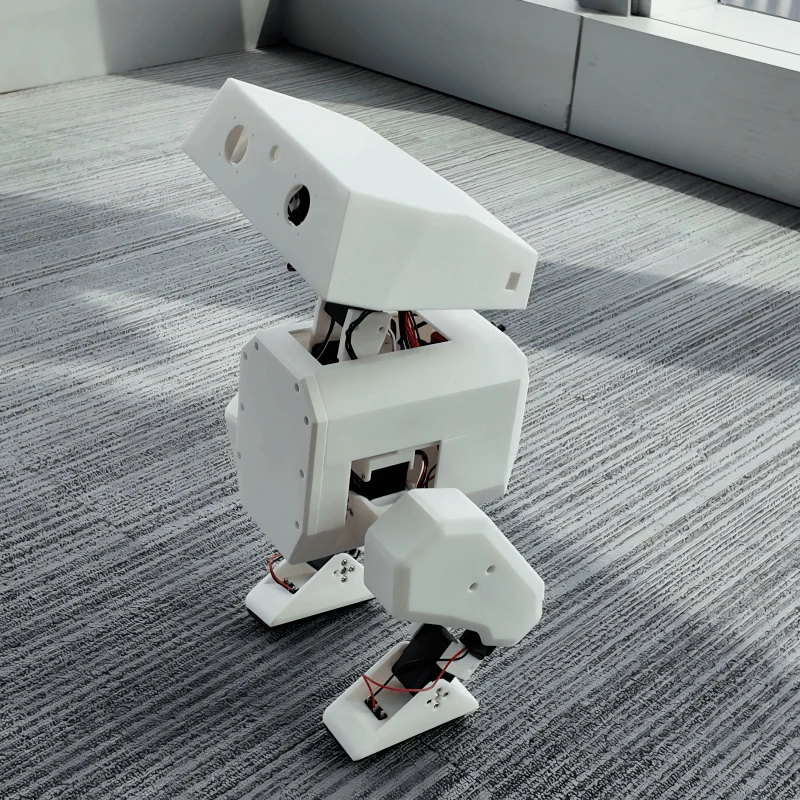
Understanding Reinforcement Learning through OpenDuck
BY
Objective: Replicate the OpenDuck Mini project and control it using the RDK X5 development…

NavTalk Digital Human Loop Video Generation Technical Implementation
BY
I. Background and Objectives In the NavTalk real-time conversation system, digital humans need to…

Complete Guide to Deploying MIT Mini Cheetah on D-Robotics RDK S100
BY
This document aims to systematically analyze the technical architecture and implementation details of the…

NavTalk Product Update: Five Core Features Comprehensive Upgrade
BY
Major Update: This update covers five functional modules: real-time communication, Avatar management, data reporting,…
NavTalk Update: Revolutionary 200ms Response Time for Real-Time Digital Human Experience!
BY
1. Response Speed Performance Let’s get straight to the point by looking at the…

Building Real-time Voice Conversations with ElevenLabs WebSocket API: A Complete Development Guide
BY
Recently, I’ve been researching real-time voice conversation implementations and discovered that ElevenLabs Agents Platform…
NVIDIA Jetson Orin Nano Super Developer Kits – Build MIT Mini Cheetah Robot
BY
This article aims to systematically analyze the technical architecture and implementation details of the…